
PSA, Renault, Volkswagen, Toyota, Ford… L’ensemble des constructeurs automobiles s’engage dans la course effrénée à l’automatisation des véhicules. Celle-ci n’en est cependant qu’à ses balbutiements et de nombreux défis restent à relever avant de se prendre pour Will Smith à bord de son Audi autonome dans iRobot…
Etat des lieux de l’autonomie actuelle
Au cours de l’année passée, de nombreux projets liés au véhicule autonome (VA) ont vu le jour pour l’ensemble des acteurs du secteur. Même si les expérimentations sur route ouverte ont été entachées du drame Volvo/Uber de mars 2018, les progrès techniques et les tests en interne n’ont pas cessé pour autant.
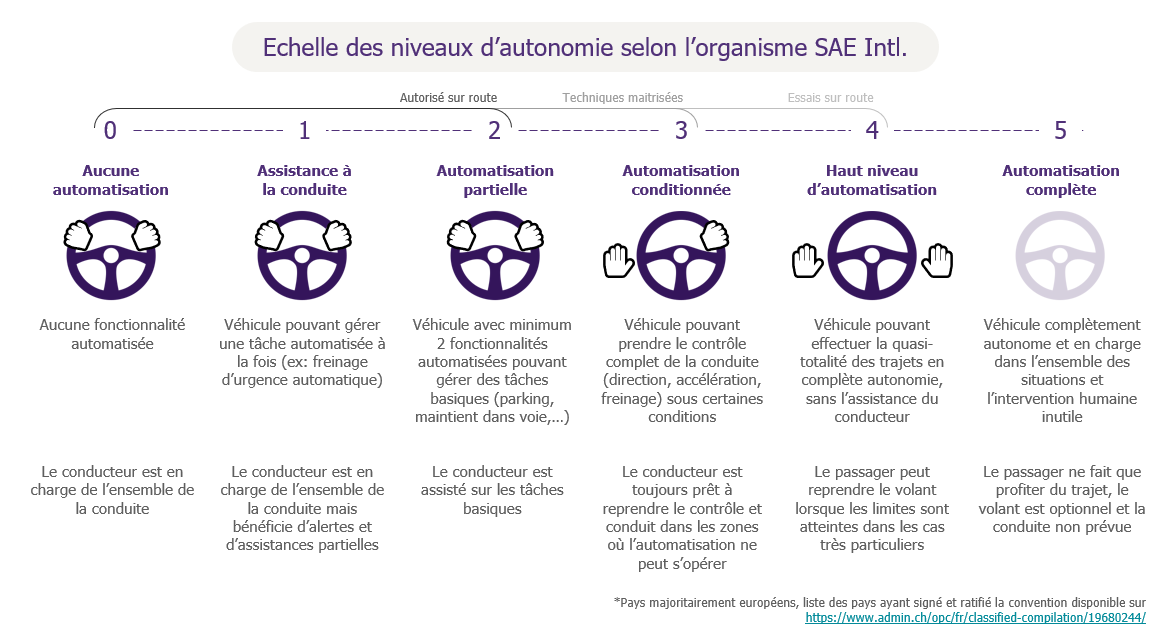
En tant que conducteur, on remarque souvent une différence notable entre les discours ou articles des constructeurs sur le sujet et la réalité des véhicules que l’on conduit au quotidien. Une raison explique bel et bien cette différence : le niveau d’autonomie atteint sur les véhicules n’est actuellement que de 3 sur l’échelle à 5 niveaux du classement de l’organisme SAE Intl. Ce niveau, techniquement atteint mais encore non autorisé pour une utilisation grand public (limitée au stade 2 pour l’ensemble des signataires de la Convention de Vienne*), permet une absence de contrôle du véhicule sur certaines routes tout en gardant une supervision permanente (illustration 1). Nos véhicules de tous les jours arborent ainsi uniquement des dispositifs d’assistance à la conduite, tel que le parking assistance ou le trafic jam assistant, prenant le relai du conducteur dans certaines conditions : ici se garer ou circuler dans les bouchons.
Plusieurs raisons permettent d’expliquer cette limitation actuelle dans l’offre d’autonomie disponible : réticence des utilisateurs, limites juridiques ou encore barrières technologiques auxquelles font face les constructeurs. Cette dernière raison reste un des défis majeurs à relever par l’ensemble des acteurs dans cette course à l’autonomie. En effet, l’une des premières limites techniques réside dans la capacité des capteurs actuels à évoluer dans des circonstances météorologiques complexes. Les LiDAR, capteurs de distance et d’environnement essentiels aux véhicules autonomes, semblent limités lorsque la neige ou le brouillard apparaissent. Le dernier progrès en date sur cette technologie est porté par la société Luminar, avec un LiDAR capable de scanner 10 fois plus loin et doté d’une précision 50 fois supérieure à celle de ses concurrents. Cette prouesse technique pourrait se coupler dans le futur avec la technologie du développeur finlandais Sensible 4, qui a créé une IA capable de reconstruire un environnement fidèle avec uniquement 10% des données recueillies par les capteurs. Une évolution qui permettrait de se déplacer dans des conditions extrêmes : neige, pluie ou brouillard. L’entreprise s’est d’ailleurs associée avec l’enseigne japonaise de magasin Muji afin de déployer, dès le premier semestre 2019, les navettes autonomes Gacha à Helsinki.
 Ces avancées technologiques sont aujourd’hui possibles grâce à l’ouverture des tests sur route ouverte couplés aux expérimentations sur simulation virtuelle. En effet, même si les kilomètres réellement parcourus par les véhicules autonomes en test ne cessent de croître, ce sont les distances parcourues en virtuel qui sont les plus importantes. Prenons pour exemple Waymo (Google) qui a parcouru plus de 11 milliards de kilomètres en simulateur contre seulement 16 millions sur route ouverte. Ces expériences virtuelles permettent de tester de nombreux environnements et situations, augmentant ainsi l’apprentissage des IA et rassurant les autorités et régulateurs. L’objectif étant de couvrir le maximum de situations afin de ne plus rencontrer de cas non maîtrisés par les IA embarquées. Cette ambition pourrait être rapidement atteinte en permettant l’amélioration de l’anticipation grâce à l’interconnectivité des véhicules.
Ces avancées technologiques sont aujourd’hui possibles grâce à l’ouverture des tests sur route ouverte couplés aux expérimentations sur simulation virtuelle. En effet, même si les kilomètres réellement parcourus par les véhicules autonomes en test ne cessent de croître, ce sont les distances parcourues en virtuel qui sont les plus importantes. Prenons pour exemple Waymo (Google) qui a parcouru plus de 11 milliards de kilomètres en simulateur contre seulement 16 millions sur route ouverte. Ces expériences virtuelles permettent de tester de nombreux environnements et situations, augmentant ainsi l’apprentissage des IA et rassurant les autorités et régulateurs. L’objectif étant de couvrir le maximum de situations afin de ne plus rencontrer de cas non maîtrisés par les IA embarquées. Cette ambition pourrait être rapidement atteinte en permettant l’amélioration de l’anticipation grâce à l’interconnectivité des véhicules.
Cette solution permet de palier l’un des principaux problèmes du véhicule autonome : la capacité de calcul nécessaire à bord. D’après les différentes estimations, l’énergie nécessaire serait équivalente à près de 100 ordinateurs afin de faire circuler un véhicule autonome de catégorie 5. Une telle puissance de calcul serait envisageable à distance uniquement grâce à un réseau 5G réparti dans la plus grande majorité du territoire, cependant son déploiement peine à se lancer. Le consortium 5GAA (5G Automotive Association) réunit plus de 90 acteurs du secteur automobile et des télécommunications en ce sens : permettre une réduction de la consommation à bord, mieux anticiper les situations de crise et réduire la production de données.
Une adaptation nécessaire des infrastructures
Si la 5G représente la pierre angulaire grâce à laquelle les applications et objets connectés communiqueront, elle ne représente qu’un seul des nombreux défis que révèlent les véhicules autonomes. En effet, ce type de mobilité et les véhicules qui y sont associés bouleversent la manière dont les espaces communs sont conçus et donc les infrastructures publiques.
A l’instar des derniers progrès de Luminar, la technologie embarquée dans les VA progresse à très grande vitesse et semble appréhender de mieux en mieux son environnement. Cependant, des limites sont toujours soulevées (intempéries, objets inattendus, bas-côté endommagé, etc.) et l’exhaustivité des cas d’usage ne sera probablement pas couverte par la simple analyse d’un unique radar. La nécessité de communiquer entre les véhicules et l’infrastructure apparaît donc comme un moyen de se prémunir contre un plus grand nombre de risques et d’améliorer les capacités prédictives des IA embarquées.
 La communication entre les infrastructures et les véhicules se traduit aujourd’hui à travers des échanges essentiellement visuels tels que les panneaux de signalisations, le marquage au sol ou encore les messages textes diffusés sur autoroute. Ces informations peuvent être différentes selon les villes ou pays, rendant d’autant plus délicat pour un radar leur interprétation. L’un des principaux défis des développeur d’IA est ainsi d’arriver à obtenir une redondance entre les interprétations des signalisations disponibles sur route avec les informations connues grâce aux cartographies numériques GPS. Tâche d’autant plus délicate lorsque les informations nécessaires à l’évolution d’un VA sur route ne sont parfois tout simplement pas disponible. C’est le cas sur plus de 50% des routes en France qui n’ont pas de marquage au sol selon Pierre Calvin, président des Routes de France.
La communication entre les infrastructures et les véhicules se traduit aujourd’hui à travers des échanges essentiellement visuels tels que les panneaux de signalisations, le marquage au sol ou encore les messages textes diffusés sur autoroute. Ces informations peuvent être différentes selon les villes ou pays, rendant d’autant plus délicat pour un radar leur interprétation. L’un des principaux défis des développeur d’IA est ainsi d’arriver à obtenir une redondance entre les interprétations des signalisations disponibles sur route avec les informations connues grâce aux cartographies numériques GPS. Tâche d’autant plus délicate lorsque les informations nécessaires à l’évolution d’un VA sur route ne sont parfois tout simplement pas disponible. C’est le cas sur plus de 50% des routes en France qui n’ont pas de marquage au sol selon Pierre Calvin, président des Routes de France.
Afin d’améliorer les échanges entre véhicules et infrastructure, des projets sont déployés à différents niveaux en France. Renault, PSA et Orange ont par exemple lancés le projet SCOOP qui a permis d’équiper plus de 2 000 km de route pour accueillir les véhicules connectés. Différents projets de voies dédiées aux véhicules autonomes sont à l’étude, à l’instar du souhait d’investissement de 100 M€ énoncé par la présidente de la région Île-de-France, Valérie Pécresse.
Ces projets ont pour ambition d’intégrer un degré de connectivité dans l’infrastructure et permettront une meilleure communication avec l’ensemble du parc automobile. Les exemples de modifications à apporter sont nombreux : feux tricolores communicants, messages personnalisés aux véhicules selon le trafic pour réduire les points de congestion, identification des véhicules prioritaires et communication en amont pour libérer le passage ou encore communication entre les véhicules pour anticiper les situations anormales grâce au recoupement des données.
Evidemment cette connectivité élargie et des infrastructures adaptées sont des conditions sine qua non à un déploiement massif de véhicules autonomes. Il est cependant important de garder en tête les dynamiques qui régissent le parc automobile actuel. La durée de vie des véhicules constituant le parc automobile français se trouve autour des 20 ans. Un renouvellement complet du parc automobile pour une flotte de véhicules autonomes, et donc communicants avec les infrastructures, est loin d’être chose faite. On parle alors d’un besoin d’évolution vers une infrastructure ‘hybride’, capable de communiquer selon les codes visuels classiques tout en transmettant et recevant des informations additionnelles avec les véhicules connectés et autonomes.
Aspect juridique et sécuritaire
L’absence d’infrastructures adaptées aux VA est loin d’avoir freiné les acteurs du secteur dans leurs essais sur route ouverte, en témoigne les millions de kilomètres parcourus par Volvo, Uber et Waymo aux Etats-Unis ou encore PSA et Valeo sur les routes françaises. Cependant, ces tests en conditions réelles ne se sont pas déroulés sans soulever de nombreuses interrogations, notamment sur les aspects sécuritaires et législatifs qui régissent actuellement l’utilisation des véhicules privés.
 En mars 2018, un accident mortel, impliquant un véhicule autonome Volvo opéré par la société Uber, a provoqué un arrêt général des tests sur route ouverte et a remis en question la pertinence des mesures de sécurité actuellement prises par les constructeurs. Jusqu’à cette date, les véhicules en tests étaient obligatoirement assistés par un opérateur à bord, qui pouvait à tout moment reprendre les commandes et contrôler le véhicule. Malgré cette précaution, l’accident n’a pu être évité, et le niveau de technologie embarquée n’était pas suffisant pour anticiper l’évènement. Si cet accident a soulevé un doute général sur la sécurité des VA, elle n’a pour autant pas sonné le glas des essais puisque ceux-ci ont repris depuis la fin d’année 2018. En effet, la concurrence étant trop importante sur le secteur, les grands acteurs tels qu’Uber ou Google ont préféré ne pas se faire devancer et ont ainsi continué leurs recherches pour améliorer la sécurité de leurs véhicules.
En mars 2018, un accident mortel, impliquant un véhicule autonome Volvo opéré par la société Uber, a provoqué un arrêt général des tests sur route ouverte et a remis en question la pertinence des mesures de sécurité actuellement prises par les constructeurs. Jusqu’à cette date, les véhicules en tests étaient obligatoirement assistés par un opérateur à bord, qui pouvait à tout moment reprendre les commandes et contrôler le véhicule. Malgré cette précaution, l’accident n’a pu être évité, et le niveau de technologie embarquée n’était pas suffisant pour anticiper l’évènement. Si cet accident a soulevé un doute général sur la sécurité des VA, elle n’a pour autant pas sonné le glas des essais puisque ceux-ci ont repris depuis la fin d’année 2018. En effet, la concurrence étant trop importante sur le secteur, les grands acteurs tels qu’Uber ou Google ont préféré ne pas se faire devancer et ont ainsi continué leurs recherches pour améliorer la sécurité de leurs véhicules.
Le constructeur Volvo a cependant tiré une conclusion importante de cet évènement : le conducteur ne sera pas en mesure de reprendre le contrôle du véhicule assez rapidement pour éviter un accident. L’entreprise suédoise a donc décidée de faire évoluer ses véhicules directement du niveau 2 d’autonomie au niveau 4 afin d’éviter les problèmes de « reprise de volant » où le conducteur ne serait pas forcément maitre du véhicule. L’un des états les plus précurseur en la matière et terre d’accueil des nouvelles technologies, la Californie, a aussi fait évoluer sa législation. Les essais des véhicules étaient déjà autorisés sur son territoire avec un opérateur à bord, celui-ci ne sera dorénavant plus nécessaire mais le contrôle du véhicule devra pouvoir s’opérer en totalité à distance. Si cette nouvelle réglementation peut paraître controversée, elle amène de nombreux enjeux sécuritaires, notamment sur les risques de prise de contrôle à distance par un tiers malveillant.
Mêmes si les Etats-Unis se montrent précurseurs en matière d’autorisations sur les VA, la France ne reste pas à la traîne et souhaite aussi devenir une terre d’expérimentation privilégiée par les acteurs automobile. Se montrant plus prudente sur ses autorisations, la France suit la législation des véhicules de série au sein de l’Union Européenne, à savoir la convention de Vienne de 1968. Celle-ci précise qu’un conducteur doit pouvoir être « maître de son véhicule » à tout moment. Une évolution européenne il y a 2 ans a permis d’autoriser les « systèmes de conduite automatisés si contrôlables et désactivables par le conducteur ». Une évolution vers un niveau 3 d’autonomie dans la législation est cependant prévue pour 2019. Une réflexion a été lancée au niveau européen par la Commissaire au Transport Violeta Bulc avec un partenariat réunissant des industriels automobiles, des membres représentatifs des Etats de l’UE et la Commission européenne. L’objectif étant de permettre à l’Europe d’être une terre d’expérimentation et d’accueil des VA afin de profiter de la dynamique de ce secteur.
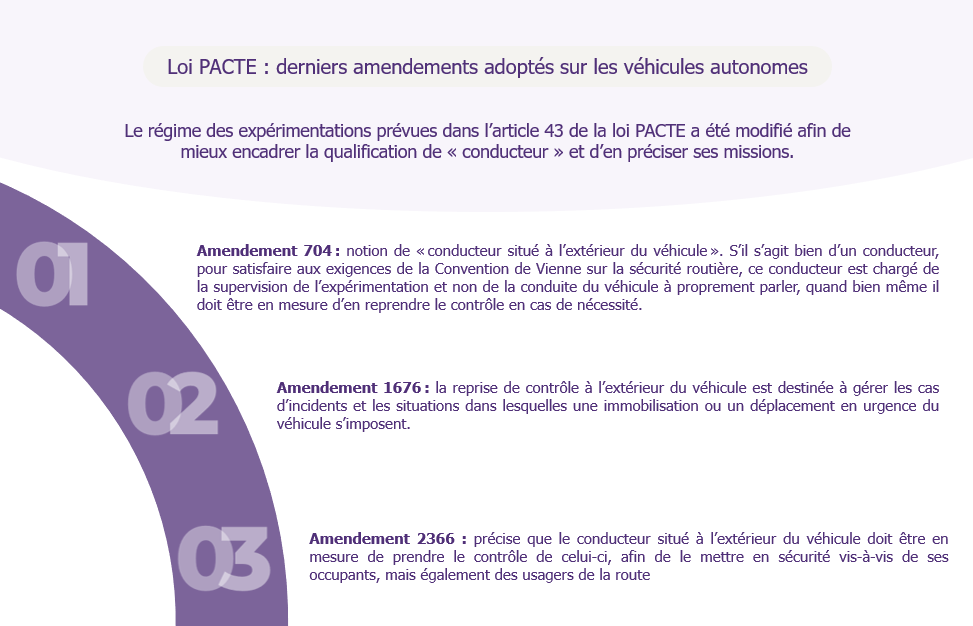
La France a souhaité faire évoluer ses autorisations de tests, en vigueur depuis 2016, en incluant dans la loi PACTE des autorisations d’essais de VA sans conducteur à bord mais devant être contrôlés à distance. Celle-ci devrait entrer en vigueur courant 2019 et, tout comme la Loi d’Orientation des Mobilités, rentre dans l’objectif du gouvernement d’améliorer les conditions de mobilités des français.
L’environnement évolue ainsi dans l’intérêt d’un développement des technologies des VA mais ne répond pas directement à l’une des questions les plus importante : qui sera responsable en cas d’accident ? Volvo est pour l’instant le seul constructeur à avoir pris une décision claire, le géant suédois sera responsable juridiquement en cas d’accident impliquant l’une de ses voitures conduites en mode autonome. Reste à savoir si les autres constructeurs emboîteront le pas de Volvo et prendront aussi à leur charge la responsabilité en cas d’accident.
Patientons donc, l’écosystème se met doucement en place et l’ensemble des acteurs avance dans une même direction. Malgré des rythmes de croisière très différents, l’attention se porte sur les points de blocage et des solutions ou partis pris émergent. Il faudra tout de même encore attendre avant de se croire dans iRobot…
Sources :
https://www.usinenouvelle.com/article/le-graal-de-l-autonomie.N742304
https://www.usinenouvelle.com/editorial/explosion-de-brevets-dans-la-voiture-autonome.N774184
https://www.journaldunet.com/economie/automobile/1419542-simulateurs-voitures-autonomes/
http://www.avere-france.org/Site/Category/ arborescence_id=2